
SENS-ENV

SENSE-ENV © CREATE








ABOUT THE PROJECT
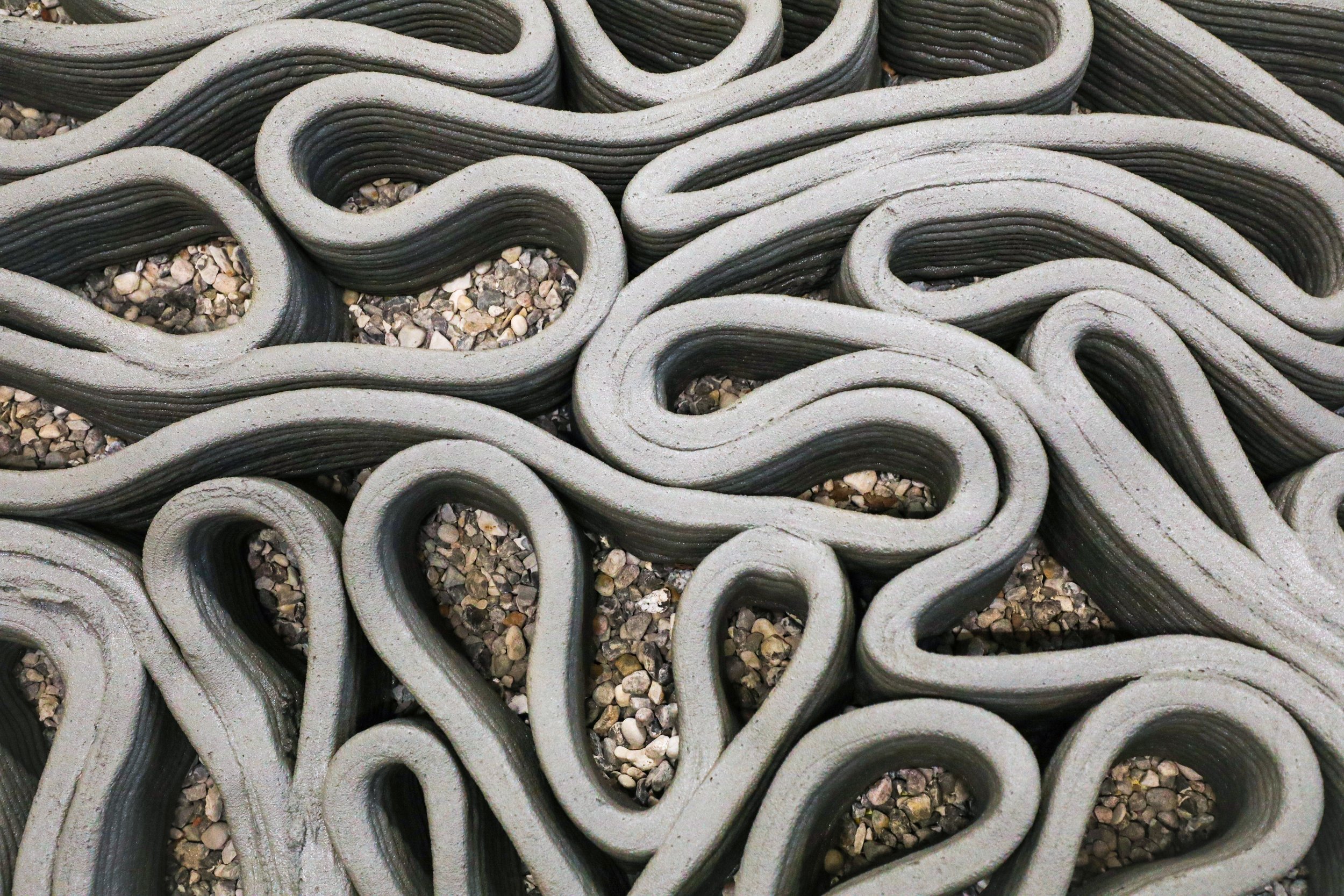
SENSE-ENV developed a design and fabrication method for 3DCP which makes printing robots able to sense and react to unknown environments (uneven and unstable grounds) and to unintended fabrication artefacts (defects or imprecisions due to mechanical conditions) by employing camera vision and feedback-loops for the generation, correction and optimization of the design and printing. We hypothesise that by equipping printing machinery with sensing devices and adaptive design algorithms we can radically expand their range of applications and effectiveness. In particular, in SENS-ENV we use camera vision to dynamically survey and assess unknown and unstructured grounds to autonomously generate tailored designs and output a robotic toolpath that is dynamically updated during the fabrication process.
The proven effectiveness of the proposed 3DCP fabrication method opens a new research territory for autonomous 3DCP, where robots will be able to gain increasing agency over multiple decision layers during the fabrication process and acquire a new design role. These capabilities could, in a short term, be employed for printing for and in harsh environments, and optimizing for structural and environmental performance without a pre-planned design.
PROJECT CREDITS
CREATE Group - Led by Ass. Prof. Dr. Roberto Naboni
Research Team: Luca Breseghello, Roberto Naboni, Sandro Sanin
Industrial Partner for 3DCP
Hyperion Robotics
Project Partners:
Concrete material: Weber Saint-Gobain Denmark
Polypropylene Fibers: Danish Fibers
